

最終更新日 2023年4月28日
前回は4K相当のVR180映像を極めて低遅延な50ms以下(41.5ms)にて、ネットワーク伝送に成功しました。都内の自社VPNサーバへ接続した測定結果です。
極低遅延3D立体視カメラシステムー4K VR180映像50ms以下(41.5ms)遅延伝送に成功
https://jouer.co.jp/ultra-low-latency-4k-3d-vr180-camera-system/
今回は、米国西部 (北カリフォルニア)と東京で接続を試します。東京から北カリフォルニアの距離は、およそ9000キロメートルです。海外との長距離低遅延伝送は成功するのでしょうか。また映像やフレームの乱れは、どの程度発生するのか実験をしました。
現地で検証したいところですが、北カリフォルニアまで飛行機でも10時間以上かかります。そのため北カリフォルニアにVPNサーバーを構築して日本から映像を送受信することにしました。
9000キロメートルのテストと考えていましたが、映像がイッテコイなので、約18000キロメートルに増えました。。。。日本の裏側にあるブラジルまで18000キロメートルです。地球の裏側に届く距離に相当する映像のネットワーク送信テストです。
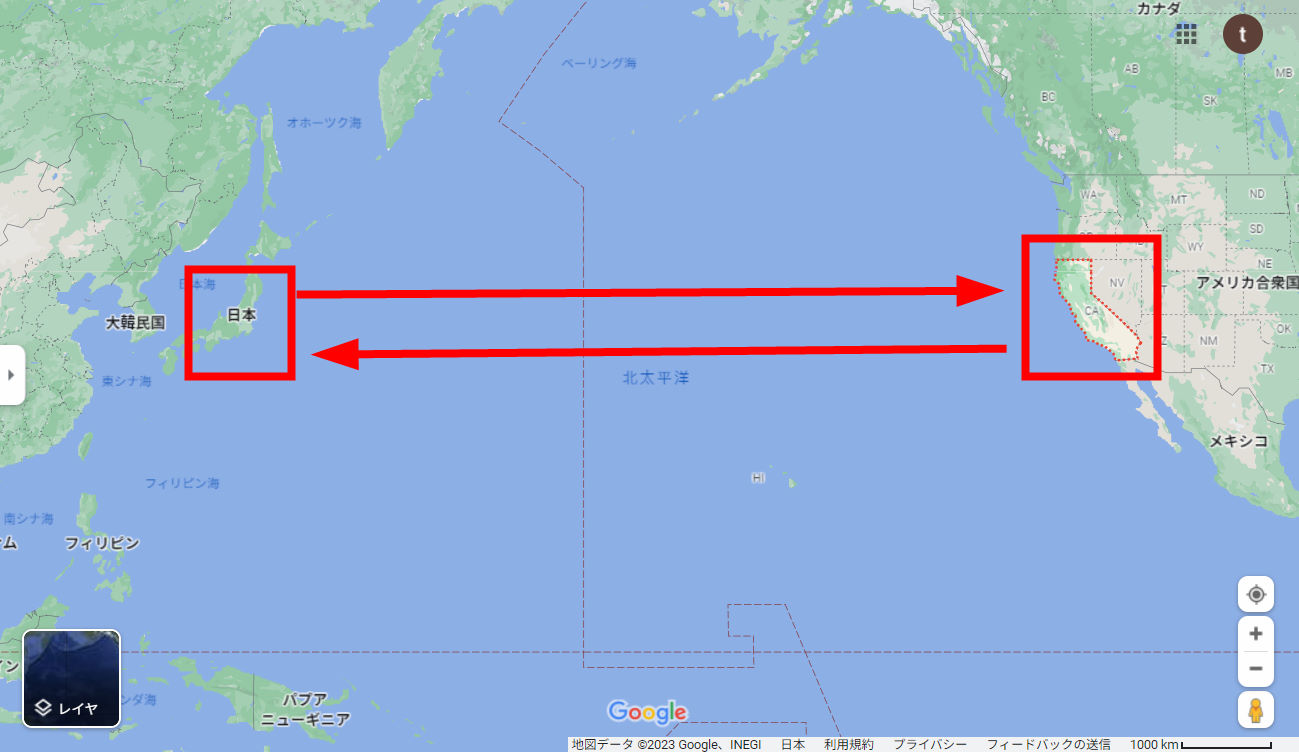
日本から北カリフォルニアサーバーまで9000キロ、北カリフォルニアサーバーから日本までの9000キロの映像伝送テストになりました。合計で18000キロです。
まず米国西部 (北カリフォルニア)にサーバーを構築してPINGテストを行います。
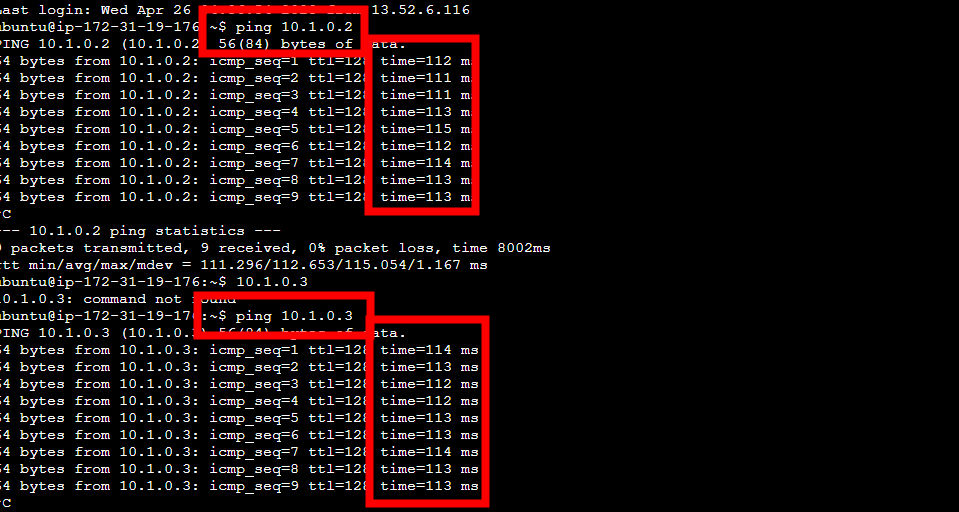
カメラ映像送信側(10.1.0.2)から
北カリフォルニアサーバー(10.1.0.1)へPINGを打ちます。
111msでした。
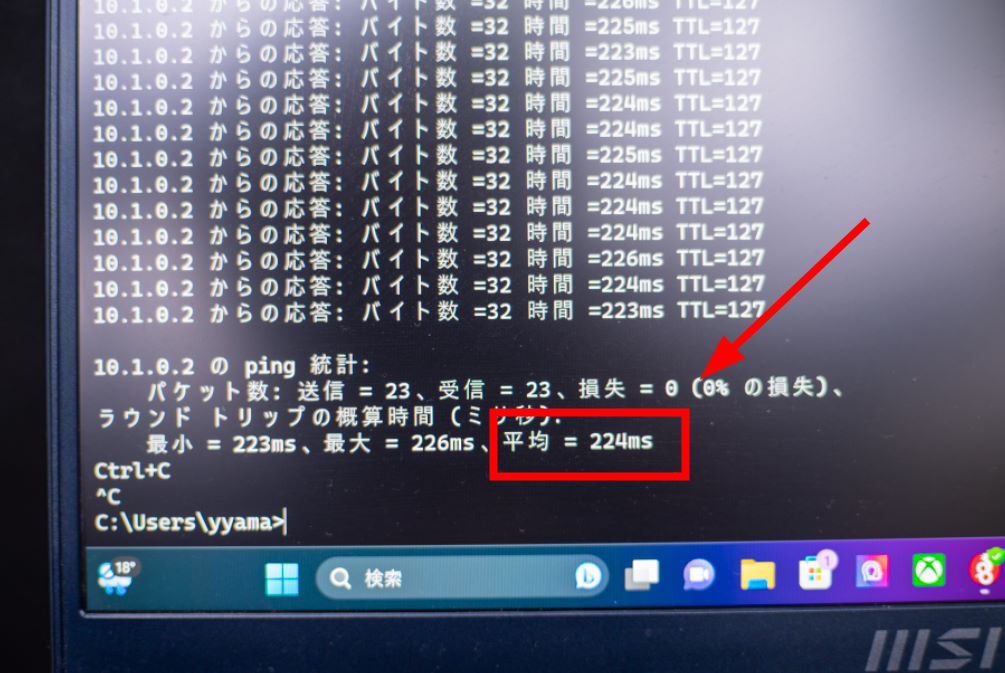
カメラ映像送信側(10.1.0.2)から
カメラ映像受信側(10.1.0.3)へPINGを打ちます。
224msでした。
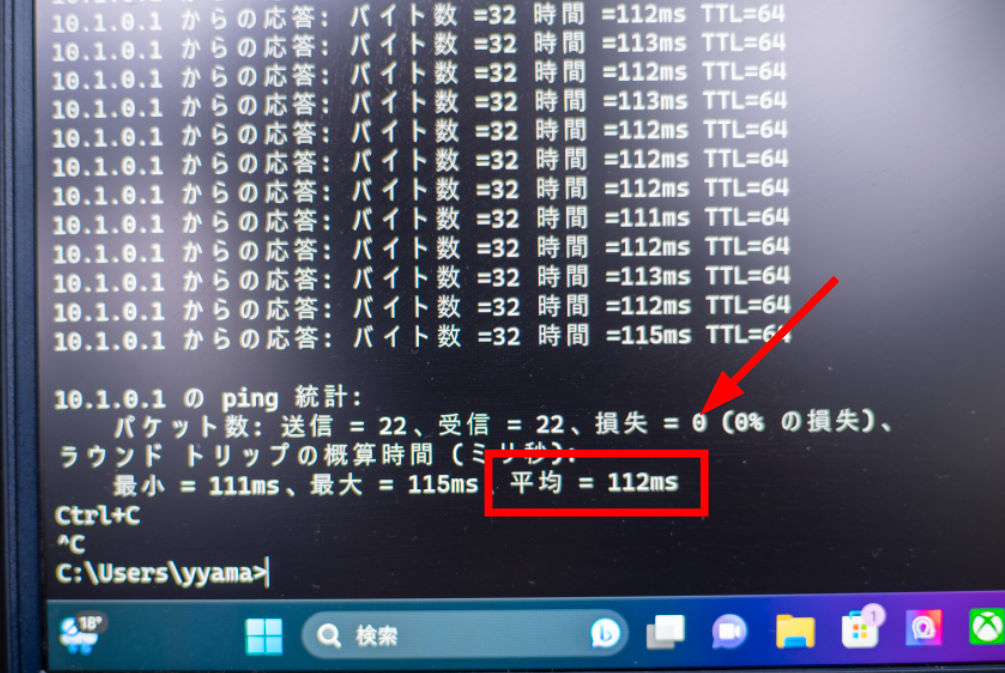
カメラ映像受信側(10.1.0.3)から
北カリフォルニアサーバー(10.1.0.1)へPINGを打ちます。
112msでした
カメラ映像受信側(10.1.0.3)から
カメラ映像送信側(10.1.0.2)へPINGを打ちます。
224msでした
北カリフォルニアサーバー(10.1.0.1)から
カメラ映像送信側(10.1.0.2)とカメラ映像受信側(10.1.0.3)へPINGを打ちます。
大体同じ結果です。
東京から北カリフォルニアサーバーの往路で110ms、北カリフォルニアサーバーから東京の往路で110ms、東京-北カリフォルニアサーバ-東京の往路で220msであることがわかりました。
東京から北カリフォルニアへの片道なら、55ms前後になるでしょう。ハードウェア構成や主な原理は前回検証と同じです。
極低遅延3D立体視カメラシステムー4K VR180映像50ms以下(41.5ms)遅延伝送に成功
https://jouer.co.jp/ultra-low-latency-4k-3d-vr180-camera-system/
検証開始
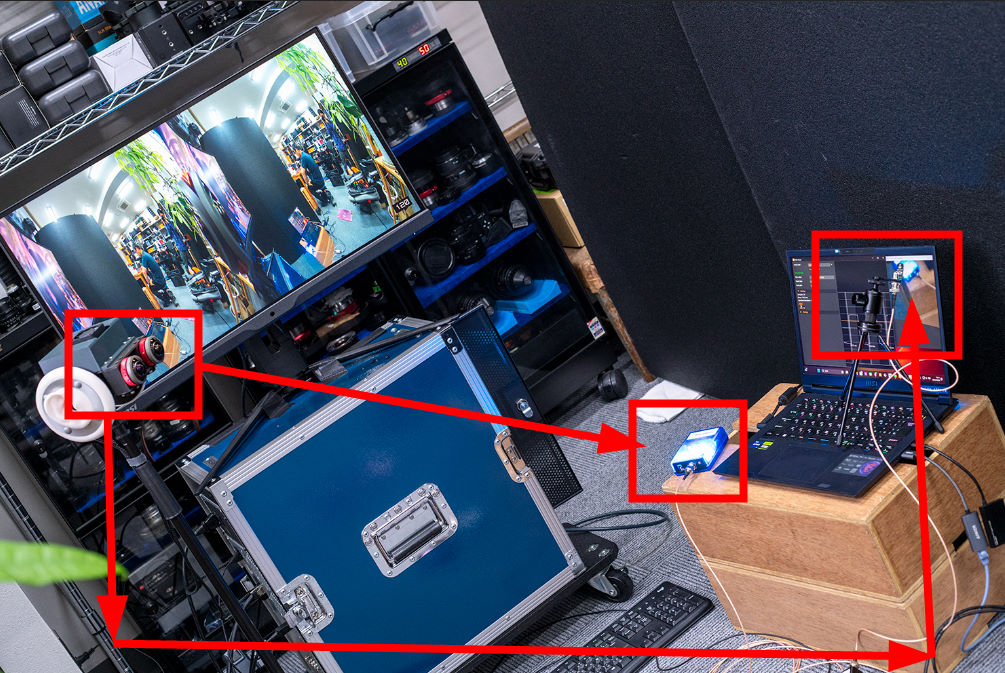
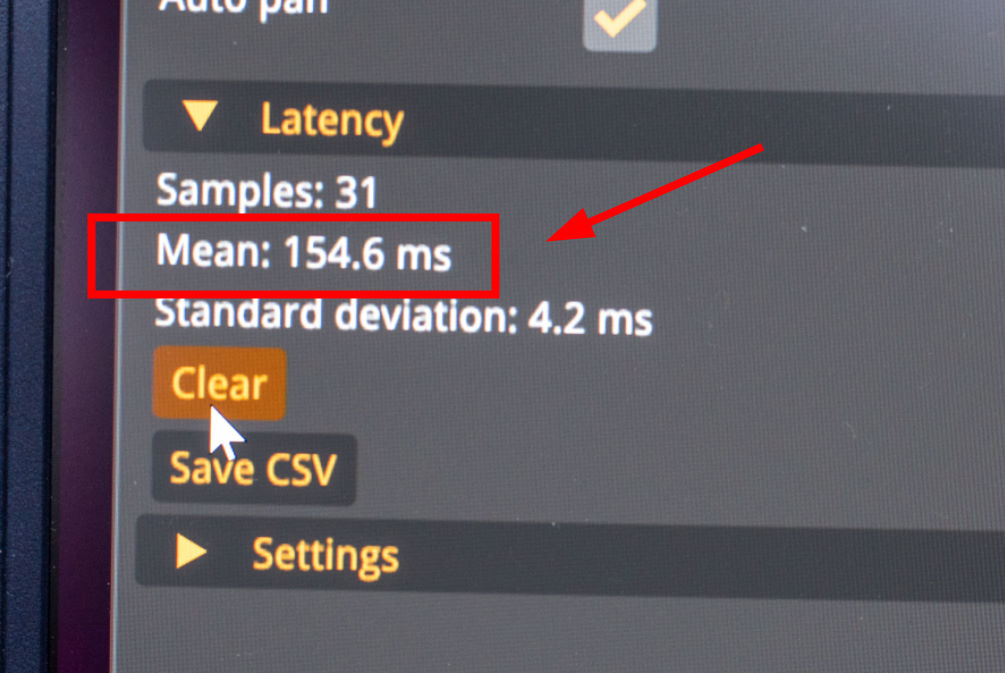
LEDセンサーを用いて映像遅延を測定します。カメラでLEDの光を撮影し、受信側のセンサーでモニターの光の点滅をチェックします。カメラから受信側モニターの遅延を確認できます。カメラの映像は、東京から送られ、北カリフォルニアサーバーを経由して、受信側のモニターに表示されます。
測定すると、東京-北カリフォルニアサーバ-東京で、155ms前後の近い数字が出てきました。おおむね想定した数値です。
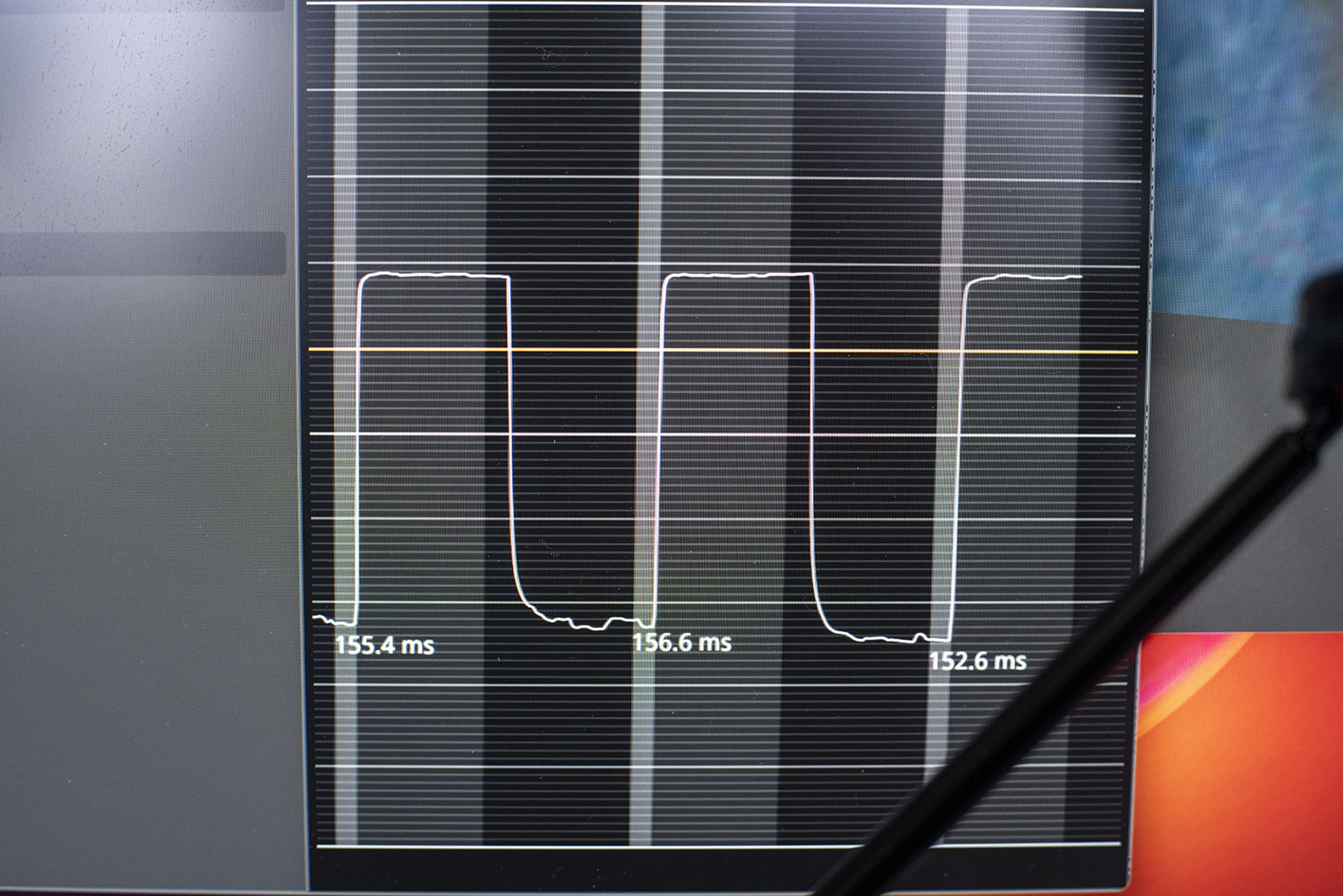
計測31サンプルで154.6msでした。東京から北カリフォルニアから東京の映像伝送の遅延結果は、160ms以下(154.6ms)です。
往路ではなく、東京から北カリフォルニア(9000キロ)へ映像を送信した場合、ネットワークの遅延はさらに半分(110msの半分55ms)になります。推定ですが100ms前後で映像が届くと思われます。
100msの映像遅延であれば、車やドローンをリモート操縦することもできるでしょう。映像を双方で送りあうことで違和感なく会話をしたり、じゃんけんしたりも可能です。
日本の裏側にあるブラジルまでの距離が約18000キロメートルです。その距離の遅延が160msです。160msは、若干は遅延を感じるものの高速では無い物体の操作であれば、コントロールできる範囲の遅延です。インターネット回線が整備されていれば、地球の裏側でも160ms以下で映像を確認できる結果でした。
映像やフレームなどの乱れもほとんど発生しませんでした。以下動画で確認いただけます。
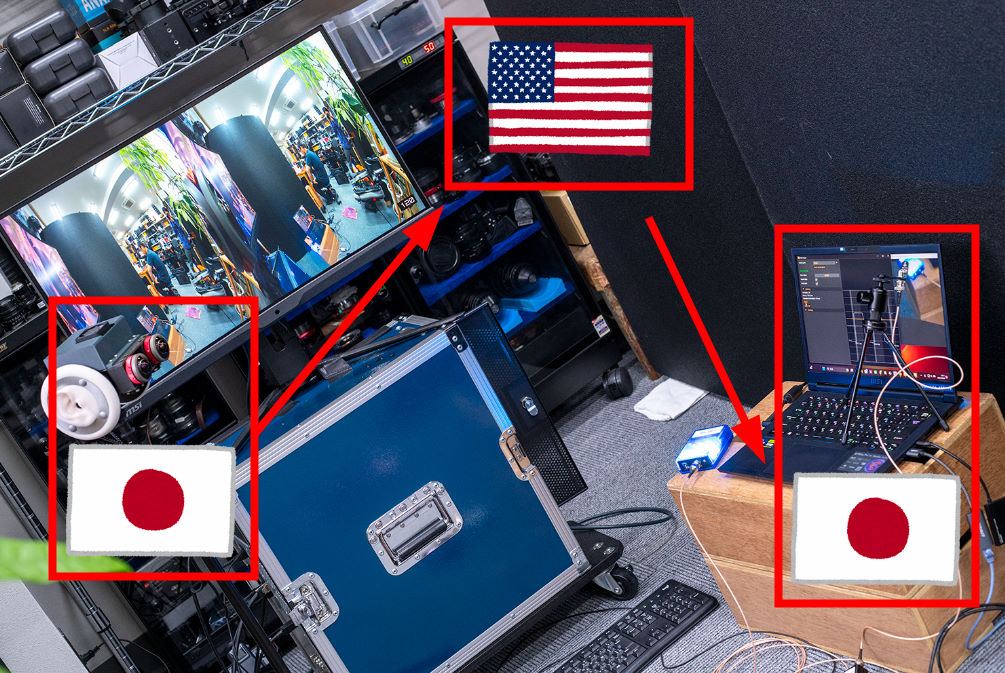
上記動画の補足です。まずカメラ直接の映像をモニターに表示しています。

映像の中に出てくるノートパソコンのモニターには、北カリフォルニアを経由した映像が表示されています。

手前のLEDとノートパソコンのモニターに映るLEDの点滅を比較することで160msの遅延の程度がわかります。

最後に、映像の乱れを確認しています。18000キロの映像伝送ですが、大きな映像の乱れもなくなめらかに表示されています。

18000キロメートルの距離でも安定した低遅延送信ができました。HMDをつなげば、3D立体視で映像を確認できます。本システムは5Gや4G LTEでも動作可能です。これらは発表予定のロボット向け極低遅延3D立体視カメラシステムの一部です。
ロボットやAIソリューションへの組み込む、テレプレゼンス、遠隔医療、工業用ロボット、自動運転車、ドローン、セキュリティ・監視システムなど様々な市場への導入が見込まれます。興味がございましたらお気軽にお問い合わせください。

















